

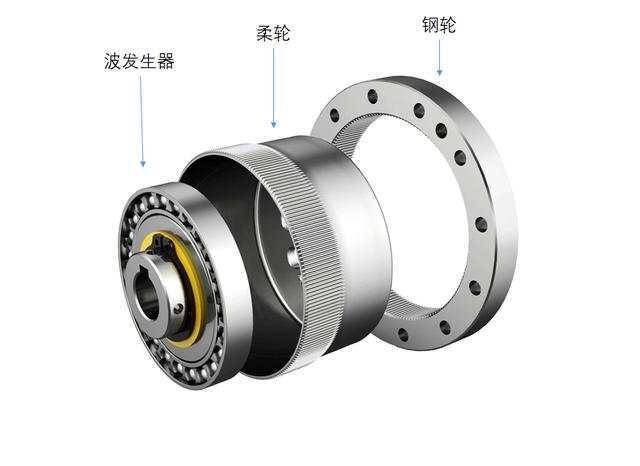
The harmonic reducer is used as a deceleration, usually by the wave generator input, rigid wheel fixed, flexible wheel output form.
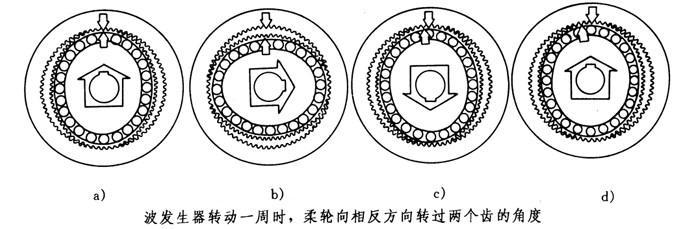
When the wave generator is loaded into the inner circle of the flexspline, the flexspline is forced to produce elastic deformation and is elliptical, so that the flexspline tooth groove at its long axis is inserted into the tooth groove of the rigid wheel and becomes a complete meshing state; while the two wheels at its short axis are completely out of contact with each other and are in a disengaged state. The process from engagement to disengagement is in a state of engagement or engagement, respectively. When the wave generator rotates continuously, the flexible wheel is forced to deform continuously, so that the two wheel teeth constantly change their working states in the process of engaging, engaging, engaging, and disengaging, resulting in the so-called wrong tooth movement, So as to realize the motion transmission between the active wave generator and the flexible wheel.


WeChat Public Number

WeChat Consulting
Service Hotline
+86-0755-23714105
Tel: +86-13392402262 Wendy Luo
Email:Wendy@homwing.com noppy@homwing.com
Add: 3/F, Building 1, Xinyuan Industrial Zone, Shangwei Park, Guxing Community, Xixiang Street, Bao'an District, 518126 Shenzhen,China